

【科研系列报告】李大超博士 多运动模式仿生软体机器人的一体化制造与约束操控机制研究
点击次数:
发布时间:2018-11-30
发布时间:2018-11-30
文章标题:【科研系列报告】李大超博士 多运动模式仿生软体机器人的一体化制造与约束操控机制研究
内容:
【科研系列报告】多运动模式仿生软体机器人的一体化制造与约束操控机制研究
报告人:李大超
地点:A302
时间:2018/09/28 周五下午五点
2018年9月28日下午,团队博士李大超针对“多运动模式仿生软体机器人的一体化制造与约束操控机制研究”做了学术汇报,就仿生软体机器人的研究进展、研究思路、存在问题等与组内同学和老师进行了深入交流和探讨。
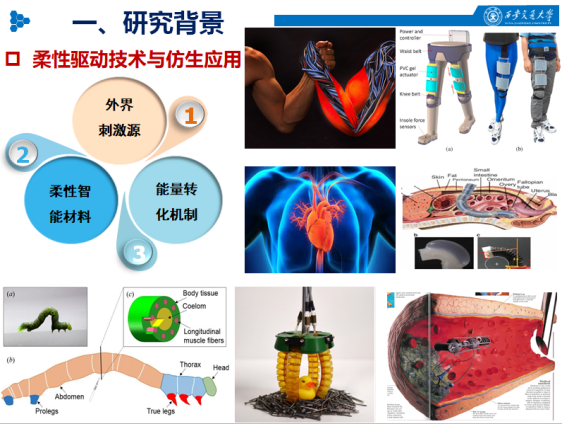
随着科技的进步机器人已经广泛应用于工业制造、国防建设等各个领域。传统的机器人通常由硬质材料的刚性运动机构连接而成,具有较高的精度、较大的驱动力。但由于其本身柔性差,运动灵活性有限,环境适应能力很低,在未知、非结构化的复杂环境下应用有限。与传统机器人相比,软体机器人的驱动结构由软材料制成,能够通过任意改变自身的尺寸和形状实现多种功能,更好地适应未知或复杂非结构化作业环境。因此,具有良好的环境适应性,多功能性等特性。柔性驱动技术,作为一种新型的能量转换装置开发技术,其核心机理为通过采用不同形式与类型的柔性智能材料,并结合其具备的刺激响应能力,将系统外界能量通过一定物理机理转化成柔性智能材料的机械能。
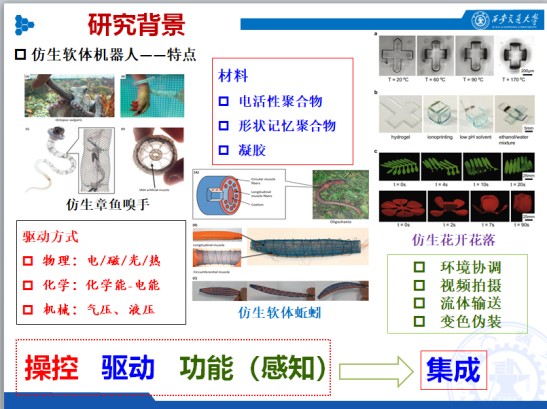
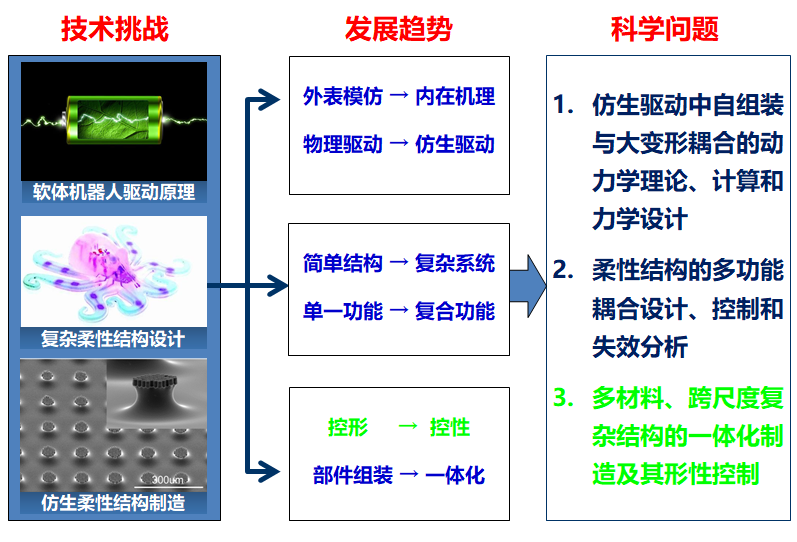
多功能软体机器人的制造方法的发展趋势是:从单材料制造向多材料制造发展、从宏尺度制造向宏/微/纳跨尺度制造发展、从控形向控性发展、从部件组装向一体化制造发展。因此,软体机器人制造方面面临的共性问题是:多材料、跨尺度复杂结构的一体化制造及其形性控制。
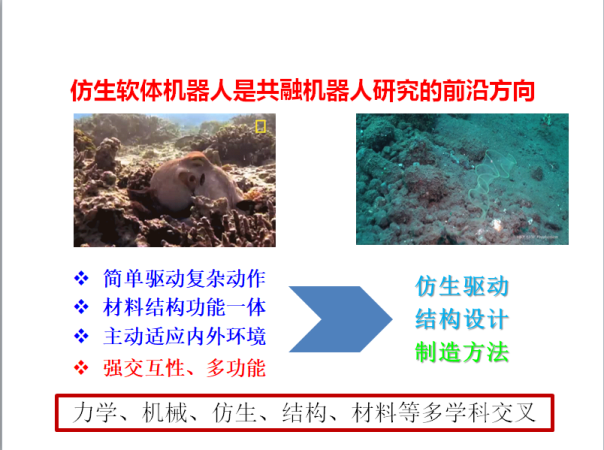
针对共性的问题,李大超博士深入开展驱动机理研究,并据此开展基于智能软材料的仿生驱动设计与优化研究,系统开展柔性多材料体系的控形控性及其一体化制造方法。提出了一种“多动模式仿生软体机器人的一体化制造与约束操控机制”。
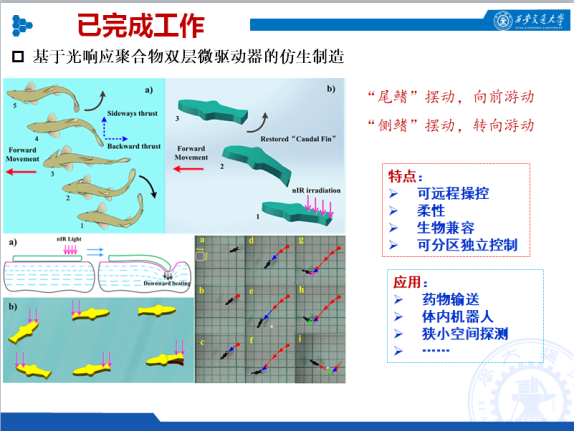
1) 多运动模式仿生软体机器人驱动机理及驱动结构设计
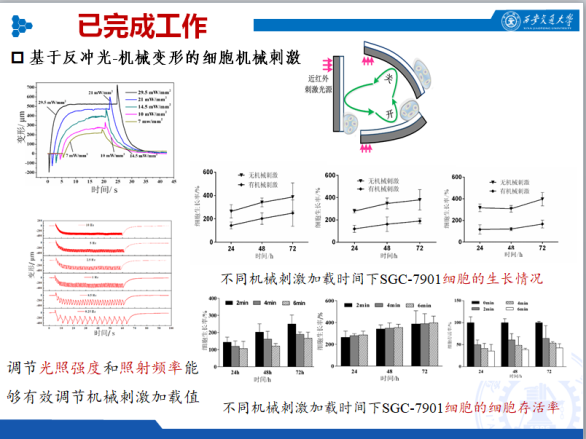
(1)仿生驱动的机理研究。
重点是探索在空间受限尺寸、力学激励、特征形状等各类环境因素发生突然改变时,仿生驱动网络如何通过聚合、解聚合、封闭、分叉等多种并行动力学反应过程调整自身的构型,达到动态适应环境的目的;
(2)软体机器人仿生驱动设计与优化研究。
针对上述获得的仿生驱动机理,以响应迅速、低耗高效、环境适应性强为软体机器人驱动器的设计目标,确定合理的仿生驱动结构设计以及优化方案。
2) 多运动模式仿生软体机器人材料-结构-一体化设计与制造技术
(1)材料界面的匹配设计及致动结构的顺应性变形设计。
针对仿生软体机器人的材料界面设计,开展柔性多材料体系的力学性能研究,优化多材料体系组成;研究柔性多材料体系动态载荷作用下的失效问题,发展复合材料界面模型,开展材料界面的动力学分析,优化材料界面的匹配设计等;
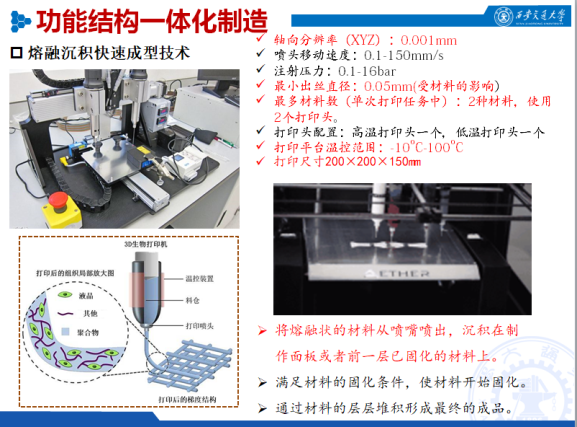
(2)柔性多材料系统/物理结构的形性可控制造技术研究。
研究采增材/压印融合的增/等材复合制造工艺,探索柔性多材料系统/物理结构的材料-结构一体化制造方法:研究智能软材料粘度及固化成型温度等因素对软体机器人功能结构的影响,通过工艺实验与性能表征,探索最佳工艺参数,发展基于智能软材料多功能单元的一体化增材制造工艺。

最后,李大超博士与课题组的同学和相关老师进行了深入交流与探讨,对该软体机器人的设计、应用与操控方法进行了讨论,对疑问进行了解答同时也激发了更多的灵感与想法。
感谢大家,我们共同努力、共同进步!