

【科研系列报告】谷同凯博士 多自由度测量理论、技术与方法的研究
点击次数:
发布时间:2018-12-01
发布时间:2018-12-01
文章标题:【科研系列报告】谷同凯博士 多自由度测量理论、技术与方法的研究
内容:
【科研系列报告】多自由度测量理论、技术与方法的研究
报告人:谷同凯
地点:A328
时间:2018/11/23 周五下午四点
2018年11月23日下午,团队博士谷同凯针对“多自由度测量理论、技术与方法的研究”做了学术汇报,就多自由度测量的研究进展、研究思路、存在问题与工作安排等与组内老师和同学进行了深入交流和探讨。
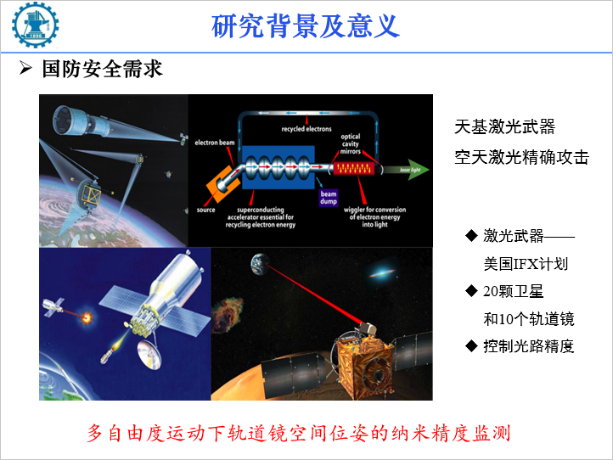
随着工程实践的需求,多自由度测量已经广泛应用于科学研究与国防建设等各个领域。例如,子镜的超精密装配及工作状态下位姿在线监测,是大口径离轴抛物面镜系统实现超强激光汇聚的关键;对轨道镜的空间位姿纳米精度监测,是提升天基激光武器实战效力的关键。

国内外关于多自由度测量技术主要包括光学解决方案(如物理光学干涉法、几何光斑位置监测法、及立体视觉法)和非光学解决方案(如电容传感器、其他传感器等)。
非光学测量由于具有输出阻抗高、负载能力差、寄生电容影响大、输出为特性非线性和价格昂贵等劣势,并非为理想的测量方法。光学解决方案多数通过设计不同的光路,然后利用光在沿整个光路传播的过程中的相关物理特性实现测量,这将使得光学测量单光路自由度标定(如果对物体六个自由度标定,需要六条光路,光路系统将变得异常复杂——组合系统繁杂)、多光路相互干扰(光路间容易干涉叠加,破坏包含物体多自由度信息的光路)、多光路迭代测量时不可避免地引起计算量加大,耗时耗力。光波在远场传播时容易受到周围环境(温度、振动以及空气中杂质)的影响。这些会对光波的(相位或振幅)信息产生不可避免的较大误差。这些方法都不能满足大科学装置对多自由度测量的需求。
针对上述测量方法的不足,我们结合了我们课题组在光栅制造与测量计数方面的优势,提出了用光栅对多自由度测量。

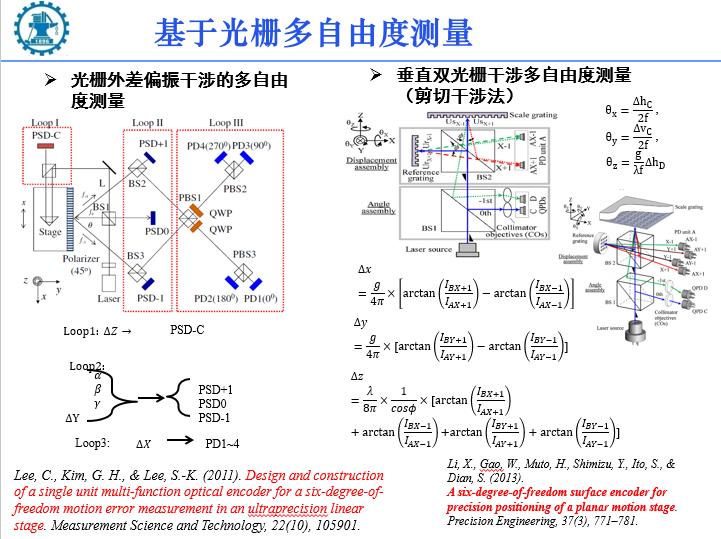
基于光栅的多自由度测量系统主要的发展趋势为:基于光栅的外差偏振干涉的多自由度测量、垂直双光栅干涉多自由度测量、立体光栅三点多自由度测量。这些测量方法虽然可以实现纳米级位移和角度的分辨率,但是光路装配复杂,对光线的准直度要求比较高,不易操作。因此,多自由度精密测量面临的共性问题是:设计复杂、操作不易、分辨率不足。
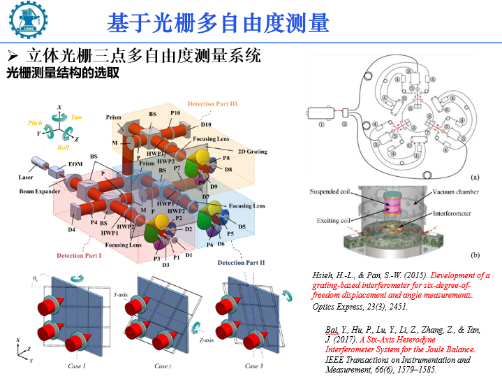
针对共性的问题,谷同凯博士深入开展了多自由度测量的理论研究,结合光栅多自由度测量系统三点准确定位的优势和垂直双光栅干涉多自由测量优异的鲁棒性、易安装性和解耦顺序无关性以及基于课题组光栅编码器精密测距离与角度的理论,开展了基于立体光栅三点多自由度测量系统的设计与优化研究。
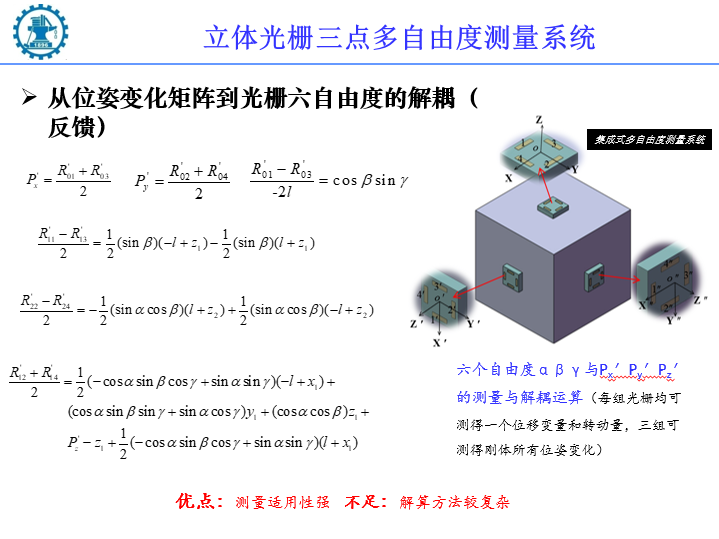
1)立体光栅三点多自由度测量系统的机理及实现的结构设计要求
(1)立体光栅三点多自由度测量系统的机理
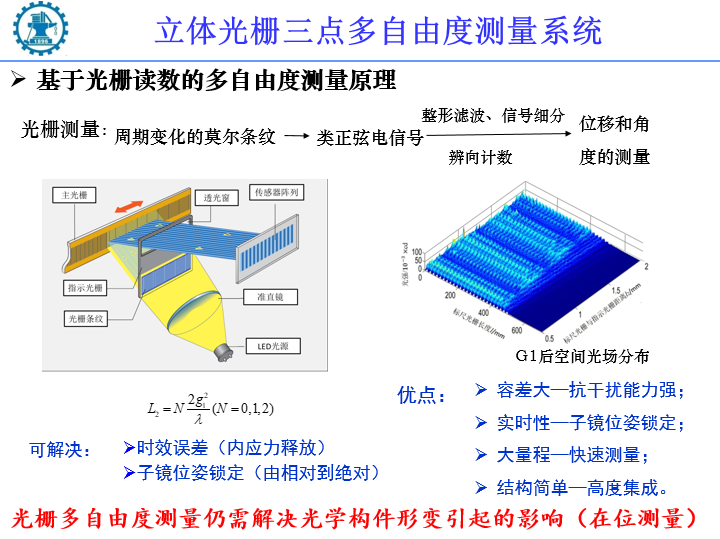
基于光栅读数系统,把变化的莫尔条纹转变为类正弦信号,再进行整形滤波、信号细分和辨向计数,可以实现光栅的位移和角度精密测量。
(2)立体光栅三点多自由度测量系统的结构集成化设计要求
利用三点定位法,需要三个读数头系统。为了尽可能减少多自由度解算时的相互干扰,每个读数头的主光栅方向采用相对平行、相临垂直的正方形模式。通过一定的空间位置分布多个光栅读数头系统,可以计算出被测物体的六个自由度。
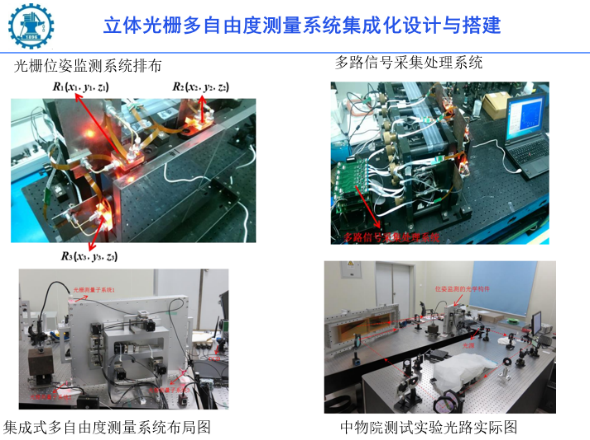
2)立体光栅三点多自由度系统集成化设计的实现与问题
(1)立体光栅多自由度系统集成化设计的实现
立体光栅块与读数头之间的相对运动主要包含信号的采集,误差补偿,信号细分以及信号传输。通过一定的算法对三块光栅所代表测点的测量值进行解算,即可得出被测动镜的实时位姿,从而可以被实时采集下来。
(2)立体光栅三点多自由度系统设计存在的问题
首先,安装调试过程困难——由光路基准与读数头与标尺光栅相对位置决定;解算方法——不可避免地省略部分自由度引起的误差,影响测量精度;读数头——多个读数头传递误差,影响测量精度。再次,系统设计后,为了解算出动镜六个自由度的运动,预先假定了运动顺序,这与实际的多自由度运动顺序很难一致,也对多自由度测量影响较大。最后,系统设计时,利用笛卡尔坐标系定位。为了方便计算,把笛卡尔坐标定在被测动镜。然而,多自由度的运动会对下次多自由度测量以及解耦算法产生不可忽略的影响。
最后,谷同凯博士与课题组的同学和相关老师进行了深入交流与探讨,对多自由度测量理论、技术与方法的研究进行了讨论,对疑问进行了解答同时也激发了更多的灵感与想法。
感谢大家,我们共同努力、共同进步!