采摘机器人










朱爱斌



|
|
|
|
|
|
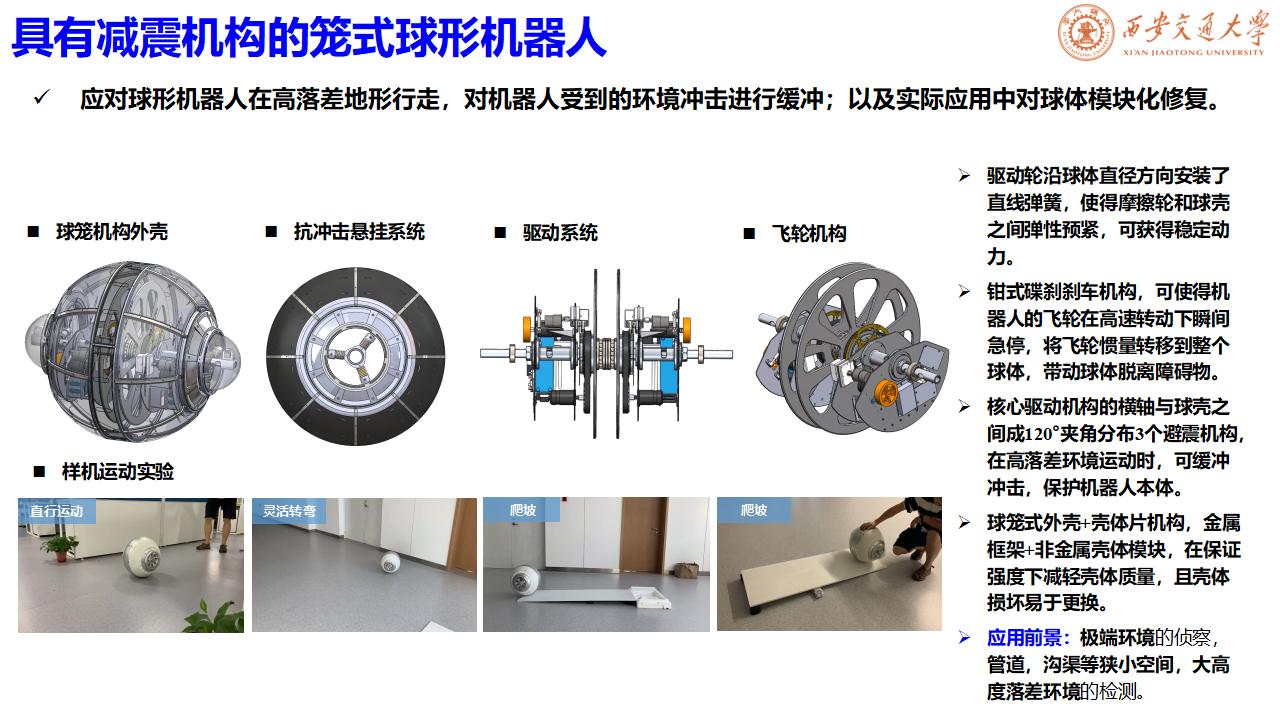
| 球形机器人无飞轮行走 | 球形机器人有飞轮自稳行走 |
 |
 |
| 球形机器人转弯行走 | 球形机器人爬坡行走 |
 |
 |
| 第二代球形机器人行走 | 第二代球形机器人爬坡 |
 |
 |
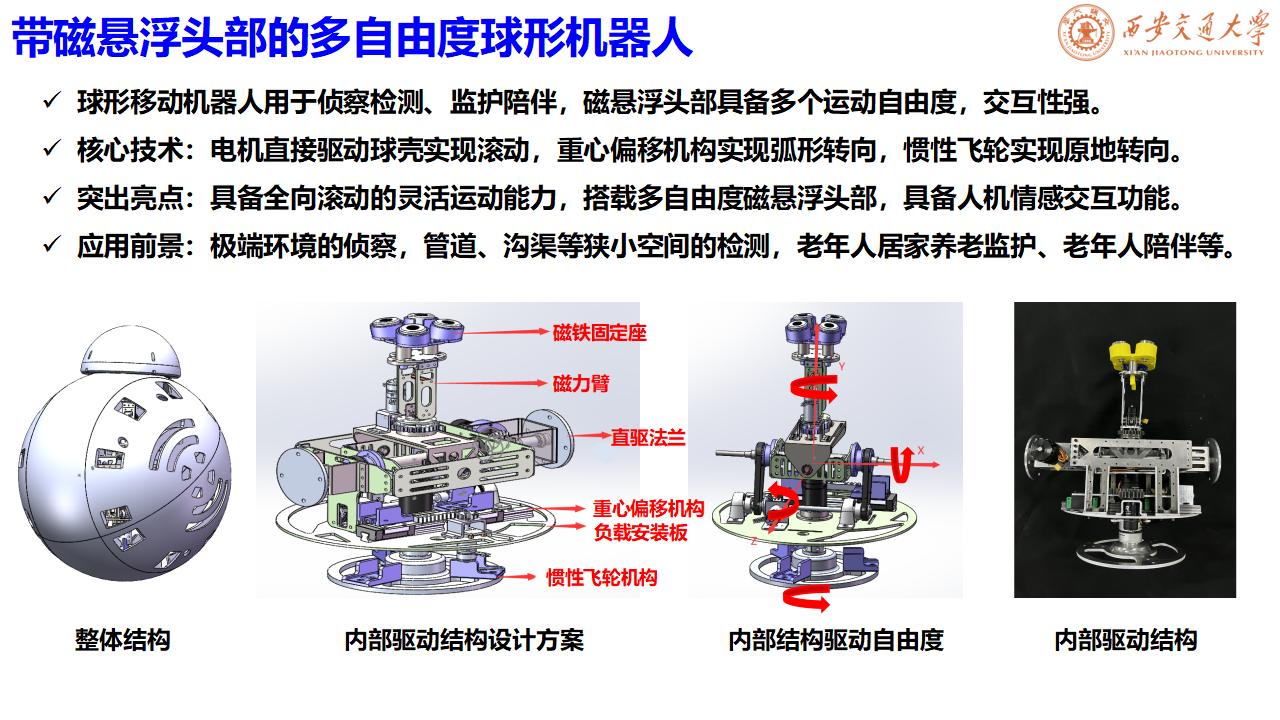
| 电磁悬浮头部的球形机器人 | 电磁悬浮头部的球形机器人自旋和行走 |
 |
 |
| 球形机器人爬坡行走 | 球形机器人过障行走 |
 |
 |
|
|
|
|
|
|
|
|
|
|
|
|
| 仿生六足机器人 | |
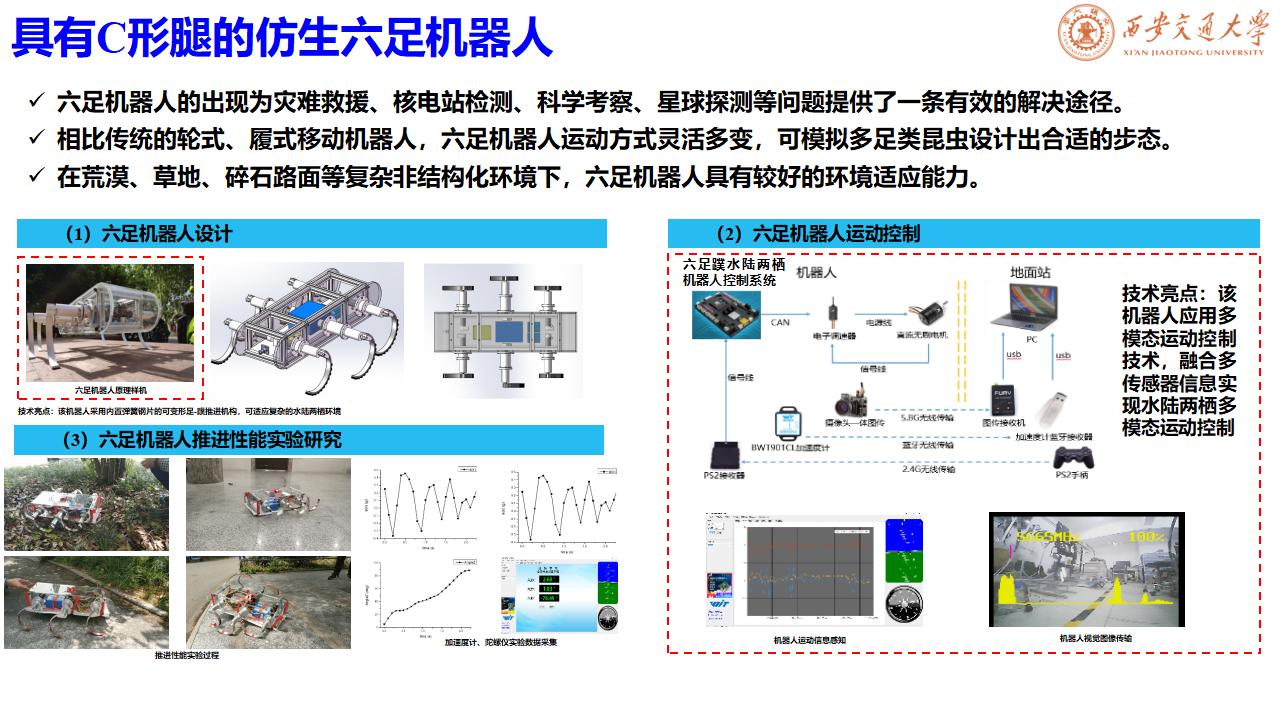
| 仿生六足机器人是仿生移动机器人的典型代表,具有丰富的步态和冗余的肢体结构,凭借其离散式的地面支撑和对障碍、沟渠等复杂特殊地形及不可预知环境的极强适应性,具有广泛的应用前景。仿生六足机器人主要针对“六足纲”昆虫(蟑螂、蚂蚁等等)实现仿生机器人。仿生六足机器人涉及机器人学、仿生学等多学科技术,是一个多学科高度交叉的复杂系统, 要使其具备足式生物卓越的地形适应能力与灵活完成复杂仿生运动的潜能,需要突破多方面瓶颈技术的限制,解决仿生结构设计、步态规划、多足协调控制等系列技术难题,以提高六足机器人整体运动性能。 | |
| 仿生六足机器人草地爬行 | 仿生六足机器人上台阶 |
 |
 |
| 仿生六足机器人下台阶爬行 | 仿生六足机器人转弯爬行 |
 |
 |
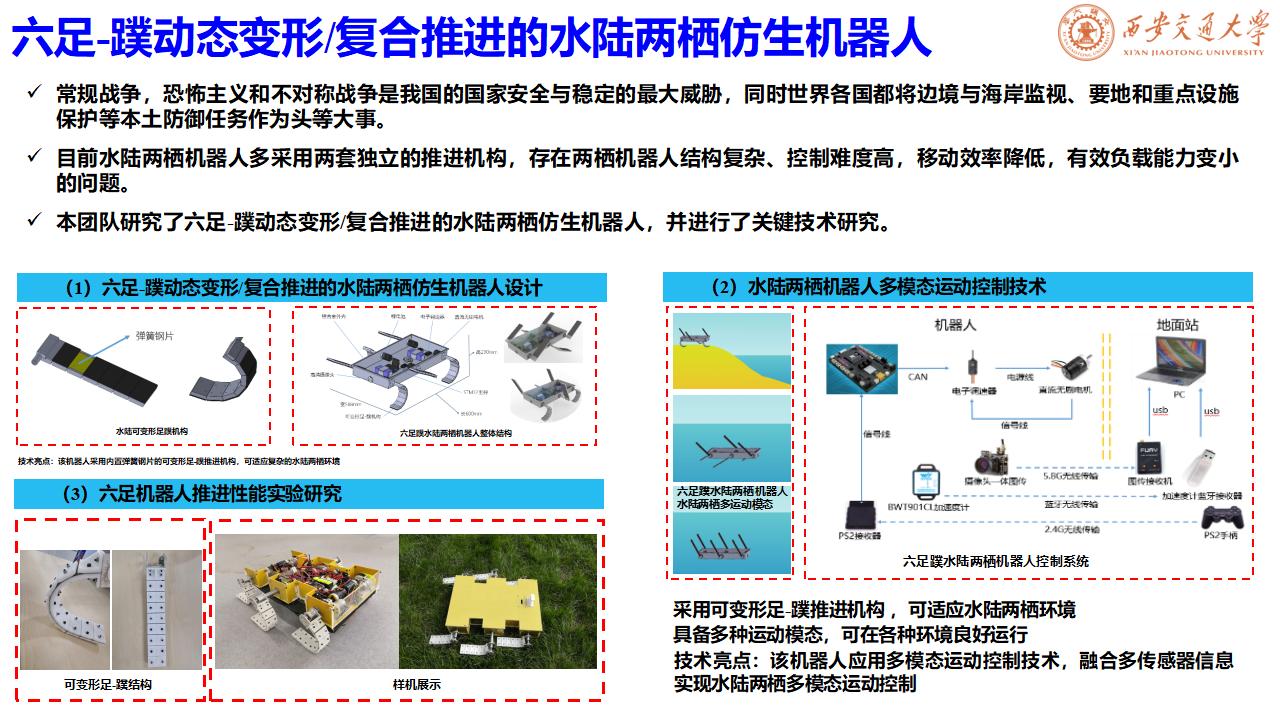
| 六足-蹼仿生移动机器人 | |
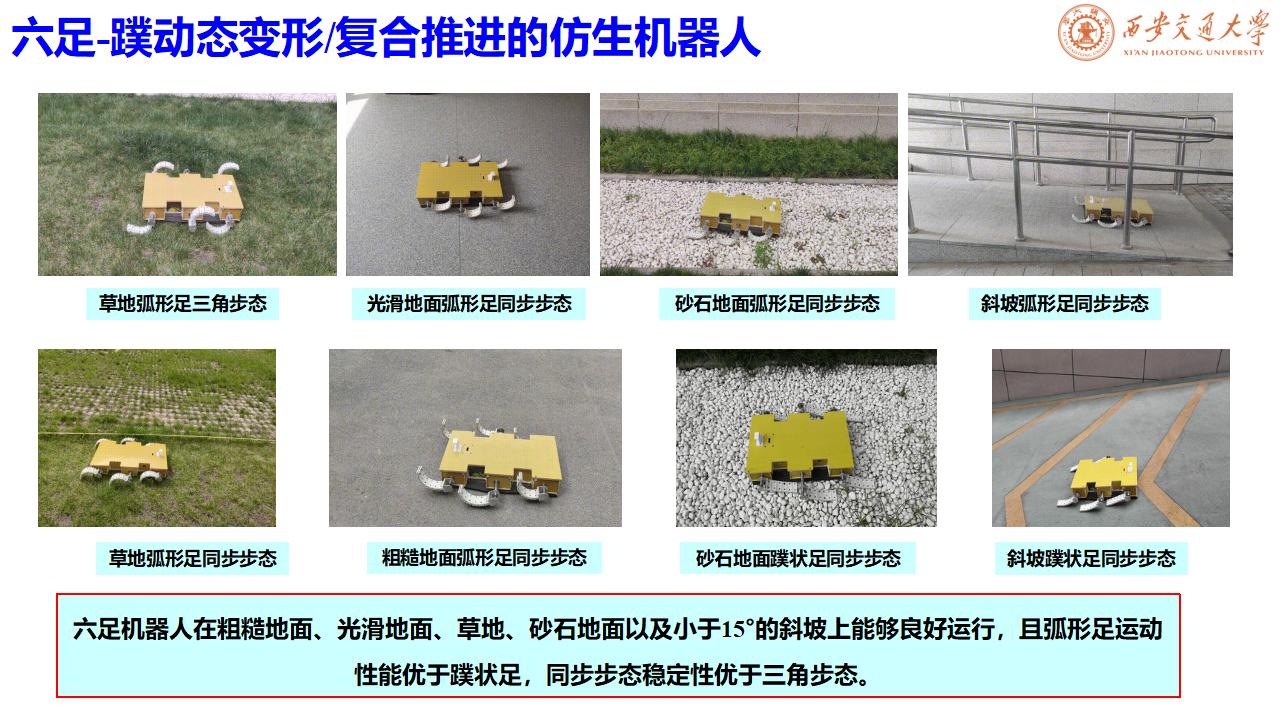
| 草地弧形足三角步态 | 砂石地面弧形足同步步态 |
|
|
|
| 砂石地面蹼状足同步步态 | 斜坡蹼状足同步步态 |
 |
 |
|
|
|
|
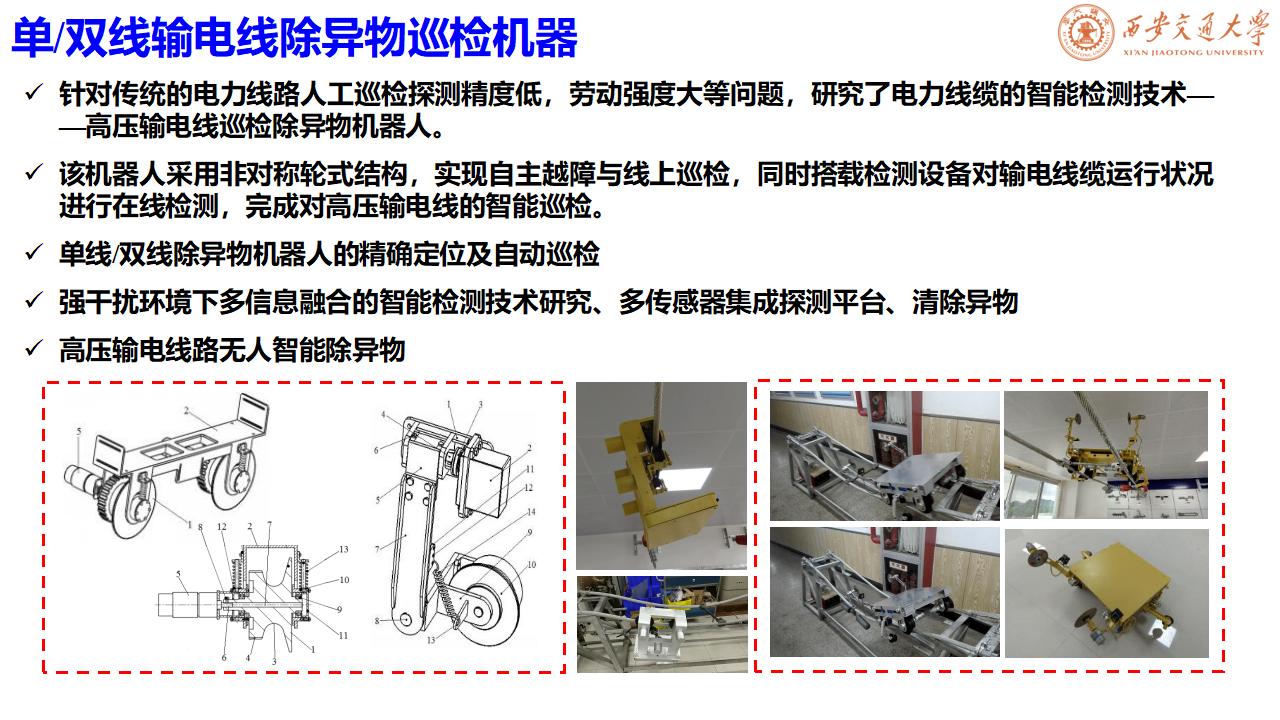
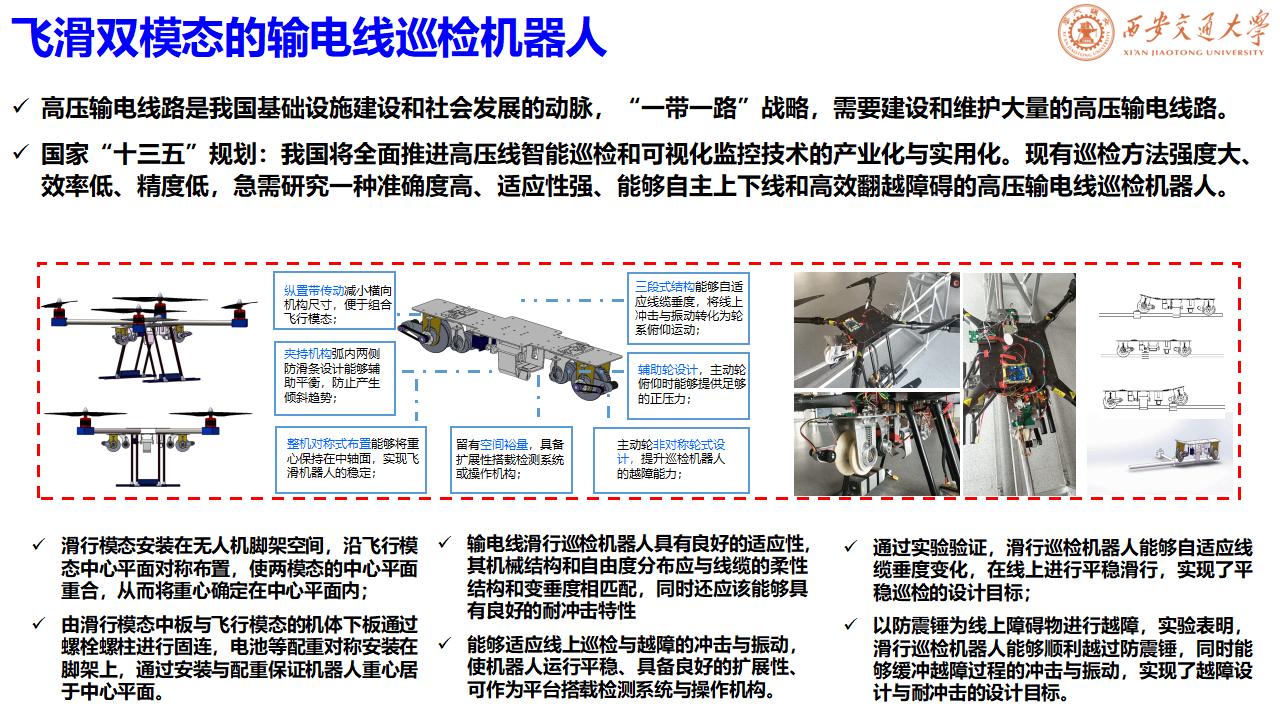
高压输电线巡检机器人
近年来,机器人技术的高速发展为高压输电线智能巡检提供了新的手段,利用机器人技术解决当前传统输电线巡检方式存在的弊端,提高输电线巡检的智能化程度,已成为国内外研究的热点。
高压输电线巡检机器人是一种通过爬越机构在高压输电线上爬行移动以及爬行越障的机器人,并能通过在机器人上搭载的传感器来近距离检测输电线上的缺陷,这种巡检机器人可以近距离的检测输电线,使巡检结果更加准确。爬滑复合巡检机器人是一种既能通过驱动滚轮在输电线上滑行运动,也能通过爬行机构在输电线上爬行越障的机器人。
 |
 |
 |
| 双线巡检—正常线路 | 双线巡检—间隔棒 | 双线巡检—防震锤 |
 |
 |
 |
| 单线巡检—正常 | 单线巡检—大角度 | 单线巡检机器人 |
|
|
|
|
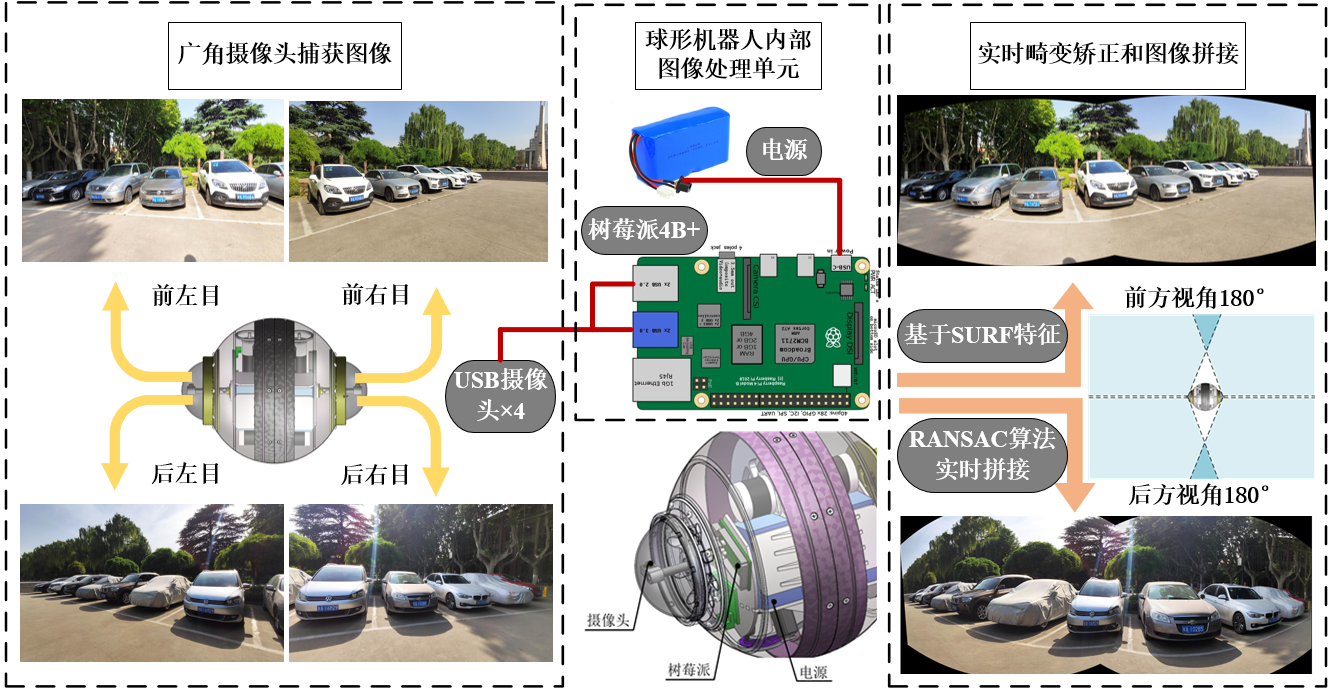
| 机器人全景感知、目标识别、自主导航技术 | |
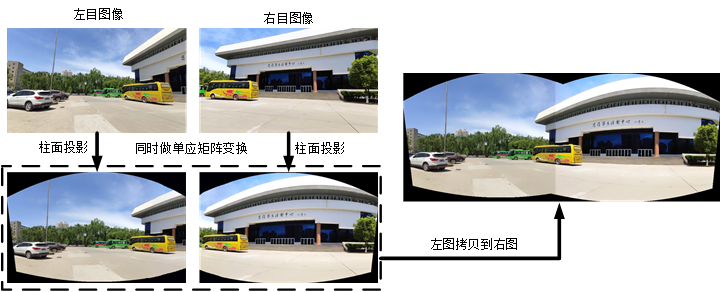
| 核心技术:基于SURF特征的图像拼接技术、基于单应矩阵的双目视觉图像投影和拼接技术、基于机器学习的实时目标检测技术 突出亮点:机器人360°全景感知与目标识别 应用前景:具备全景感知和目标识别功能的球形机器人、六足机器人 |
|
| 静态与动态图像拼接 | 360度全景感知 |
 |
 |
| 在移动过程中感知环境特征,并建立地图 | 场景语义分割技术:感知像素在场景中的含义 |
 |
 |
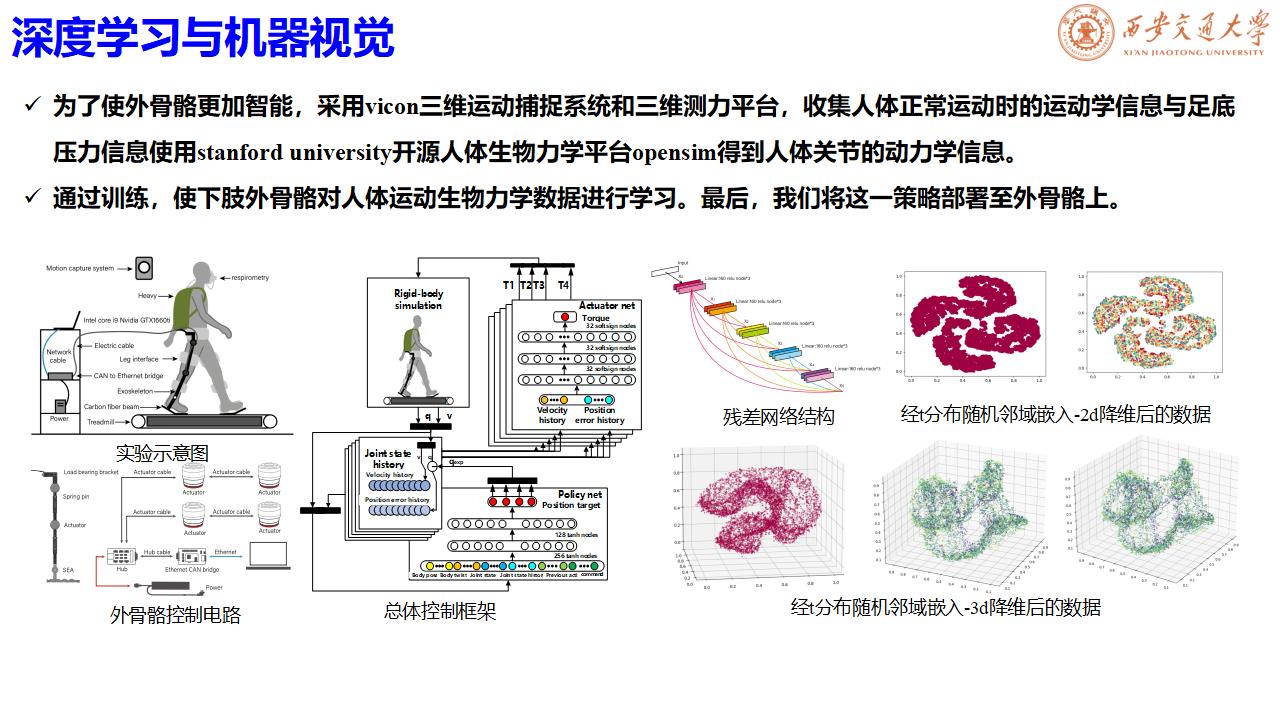
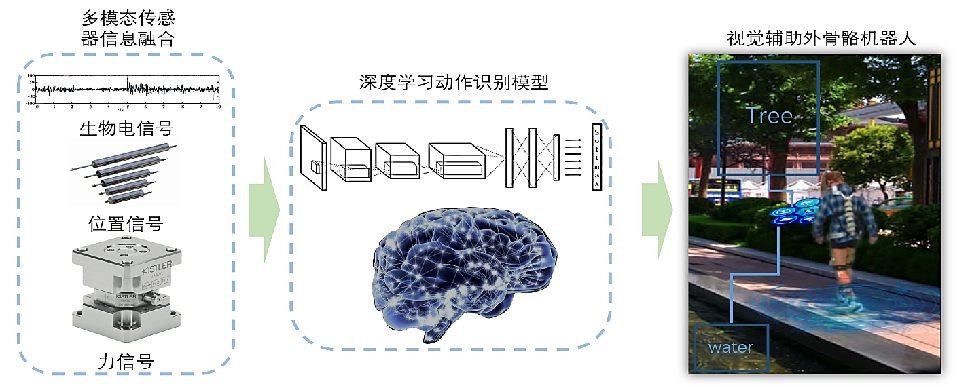
| 基于多模态深度学习的步态识别及追踪技术、机器视觉辅助的多模态融合控制技术 | |
| 核心技术:多模态深度学习的步态识别及追踪技术通过基于卷积神经网络的深度学习模型,对传统物理传感器和生物信号(脑电、肌电)等多模态传感器信息进行空间维度和时间维度的耦合特征提取,建立以人、外骨骼机器人相互协同的智能系统,实现从多模态传感训练信息到人体步态准确分类、追踪等运动意图分析的端到端输出。 突出亮点:机器视觉辅助的多模融合控制技术将机器视觉技术与传统的多模态信息分析技术相融合,通过深度摄像机等视觉信息采集设备充分挖掘周围环境对运动决策的内在影响,在人机交互智能系统的基础上引入视觉环境辅助,将人的智能判断与多模信息、视觉辅助的机器自主决策相融合,提升外骨骼机器人在因应不同环境时对人的判断决策进行辅助矫正的能力,实现外骨骼机器人全局、准确、高鲁棒性、高速、实时的人-机-环境融合控制。 |
|
| 研究工作 | |
 |
|