朱爱斌
博士生导师
职称:教授
教师姓名:朱爱斌
办公地点:陕西西安咸宁西路28号
创新港校区2号巨构
创新港校区2号巨构
学位:博士
主要任职:陕西省智能机器人重点实验室副主任;西安交通大学工业设计系主任
毕业院校:西安交通大学
所属院系:机械工程学院
学科:机械工程
|
|
|
|
|
|
|
|
|
|
|
|
| 仿生六足机器人 | |
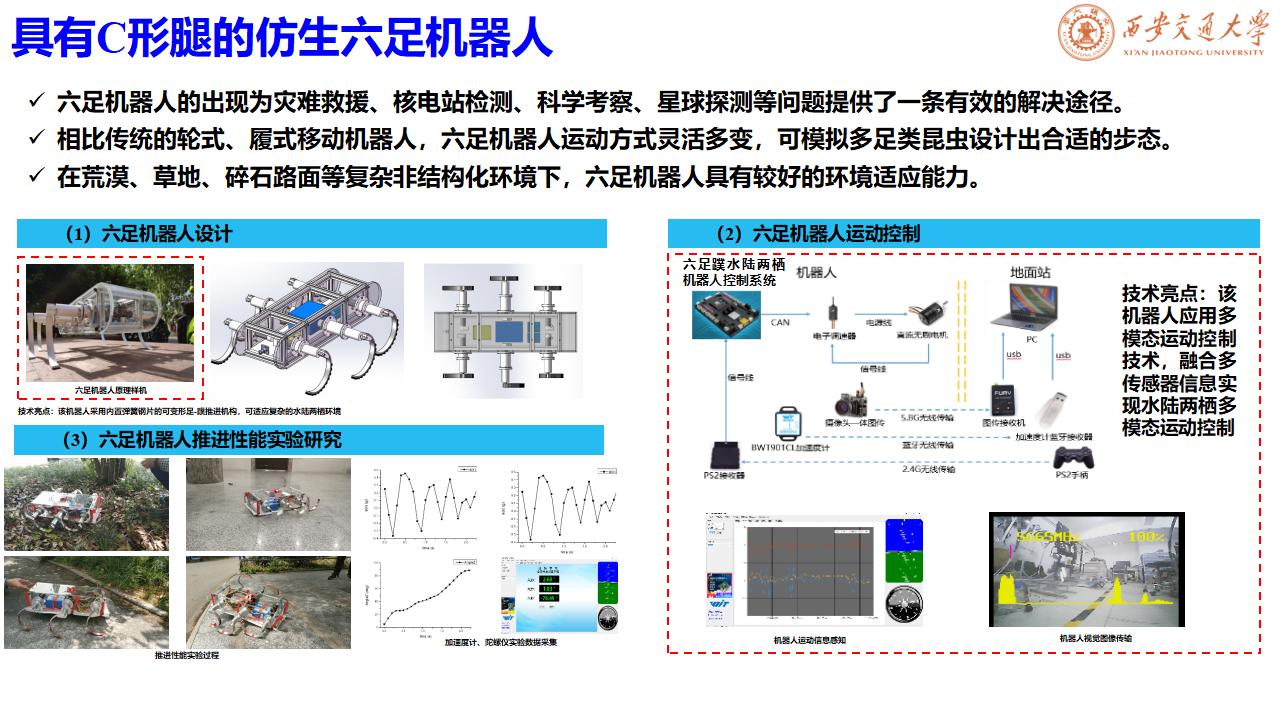
| 仿生六足机器人是仿生移动机器人的典型代表,具有丰富的步态和冗余的肢体结构,凭借其离散式的地面支撑和对障碍、沟渠等复杂特殊地形及不可预知环境的极强适应性,具有广泛的应用前景。仿生六足机器人主要针对“六足纲”昆虫(蟑螂、蚂蚁等等)实现仿生机器人。仿生六足机器人涉及机器人学、仿生学等多学科技术,是一个多学科高度交叉的复杂系统, 要使其具备足式生物卓越的地形适应能力与灵活完成复杂仿生运动的潜能,需要突破多方面瓶颈技术的限制,解决仿生结构设计、步态规划、多足协调控制等系列技术难题,以提高六足机器人整体运动性能。 | |
| 仿生六足机器人草地爬行 | 仿生六足机器人上台阶 |
 |
 |
| 仿生六足机器人下台阶爬行 | 仿生六足机器人转弯爬行 |
 |
 |
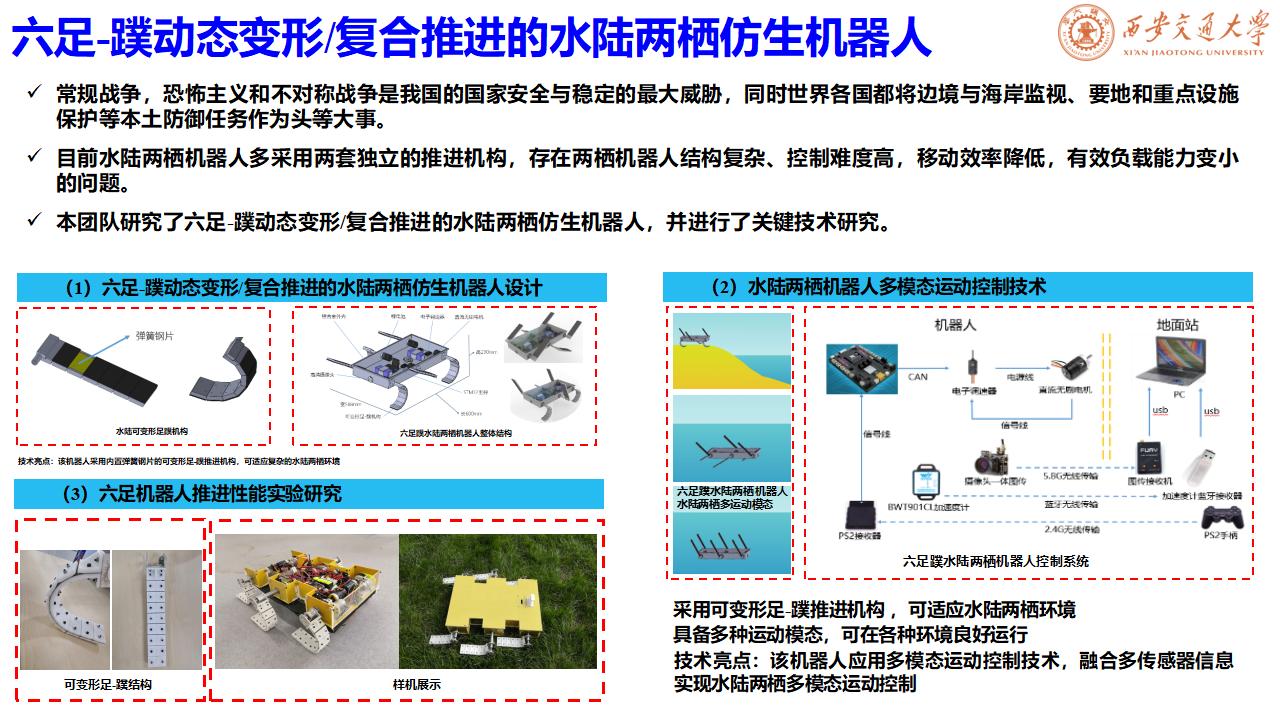
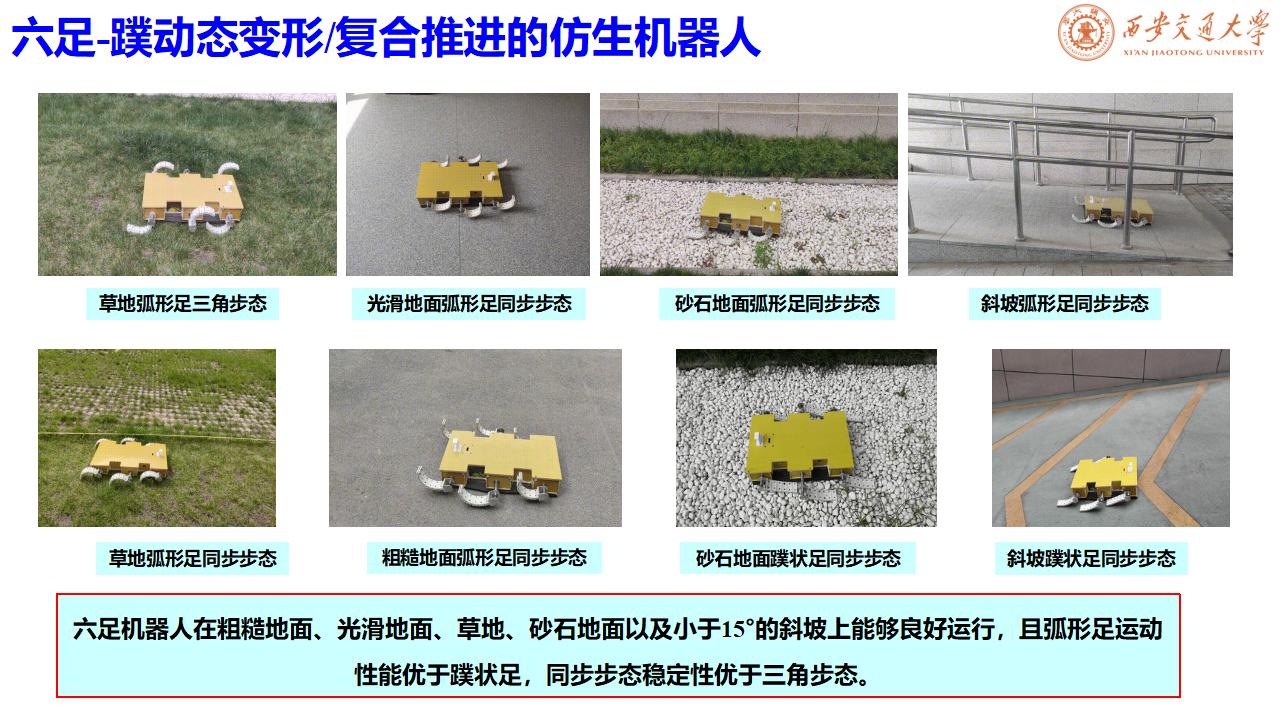
| 六足-蹼仿生移动机器人 | |
| 草地弧形足三角步态 | 砂石地面弧形足同步步态 |
|
|
|
| 砂石地面蹼状足同步步态 | 斜坡蹼状足同步步态 |
 |
 |