Personal profile
暂未填写
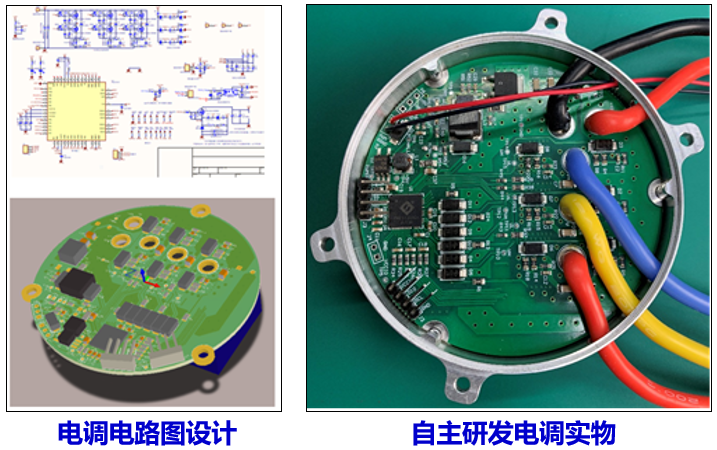
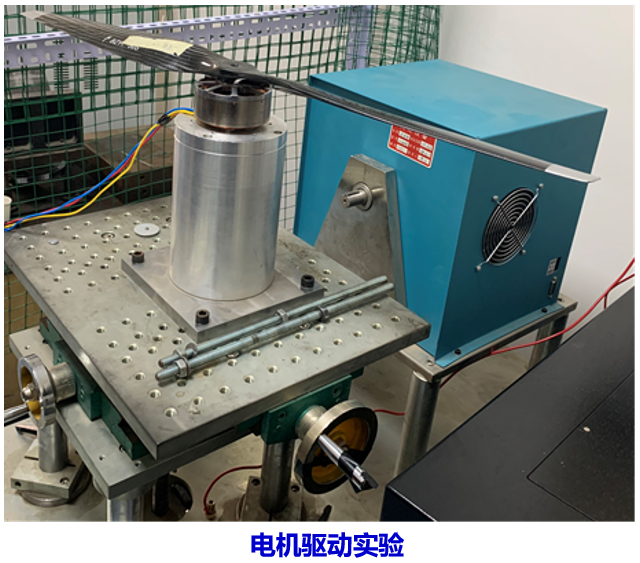
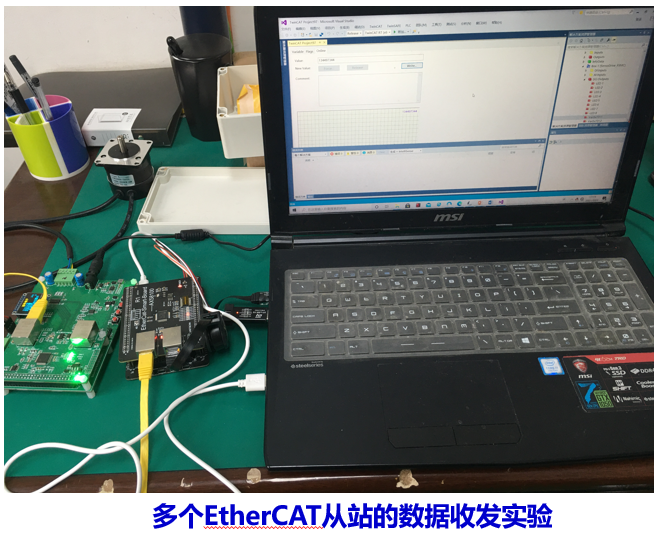
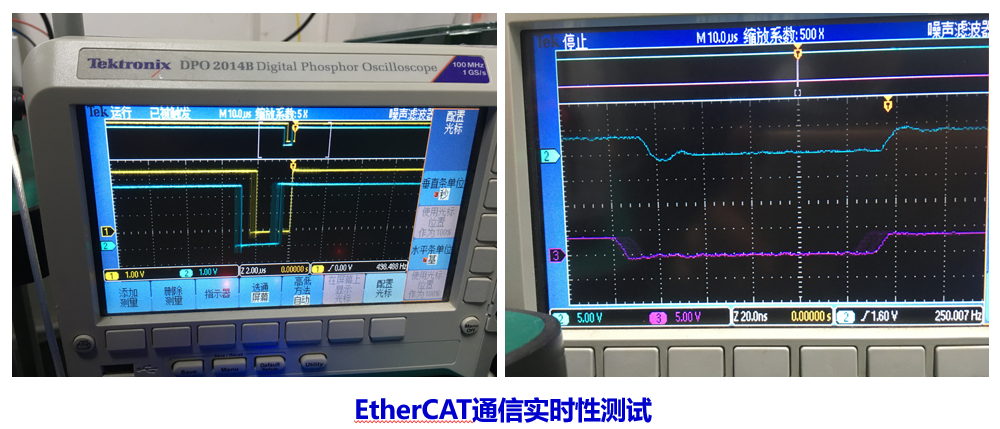
(1)研究目标:构建基于总线的驱动与控制一体化硬件系统和软件系统架构,研究BLDC高精度磁场定向理论和电机高速高精度转矩控制算法,打造机器人全状态控制整体解决方案;并应用于重载多旋翼无人机和高机动无人机,提升无人机性能和产业水平。
(2)研究进展:
版权所有:西安交通大学 陕ICP备05001571号