Personal profile
暂未填写
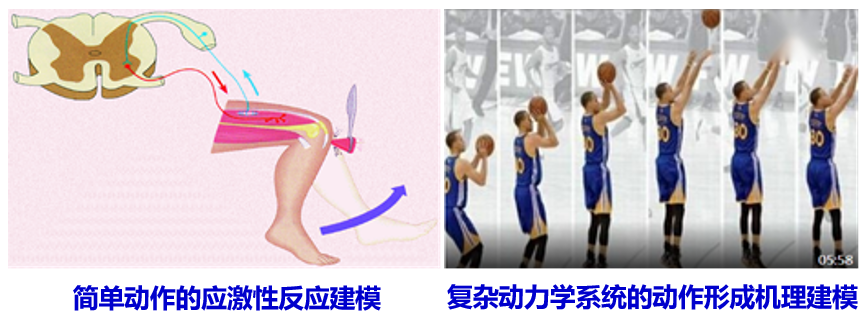
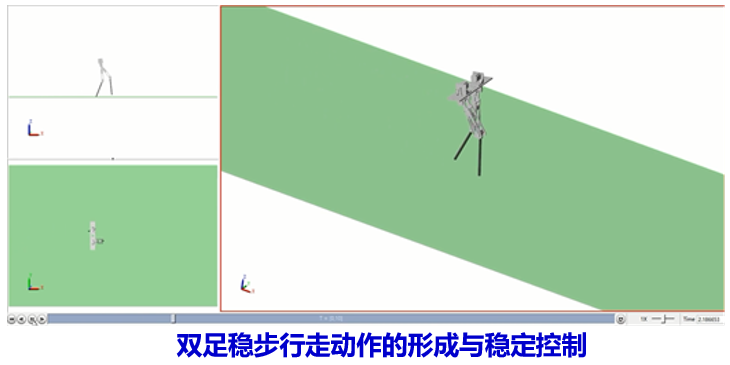
(1)研究目标:探索自然界动作形成机理,揭示动作控制的奥秘,解决多输入多输出非线性不稳定系统的鲁棒控制难题,为重载多旋翼无人机/倾转旋翼无人机的稳定控制、人形机器人的稳定控制和工业机器人的高速高精度跟踪提供理论基础。
(2)研究进展:
版权所有:西安交通大学 陕ICP备05001571号