

【论文发表】课题组韩捷博士论文被JMS录用发表
点击次数:
发布时间:2020-06-19
发布时间:2020-06-19
文章标题:【论文发表】课题组韩捷博士论文被JMS录用发表
内容:
【论文发表】课题组韩捷博士论文被JMS录用发表
近日,课题组韩捷博士的论文“
Untethered, ultra-light soft actuator based on positively charged 3D fluffy silica micro-nanofibers by electrospinning
”被国际知名期刊Journal of Materials Science录用发表(2020
IF:3.553
)
软体机器人以其无限多自由度、驱动器连续、材料应变大、安全性高、灵活性好、与障碍物兼容性高等优点而成为目前的研究热点之一。
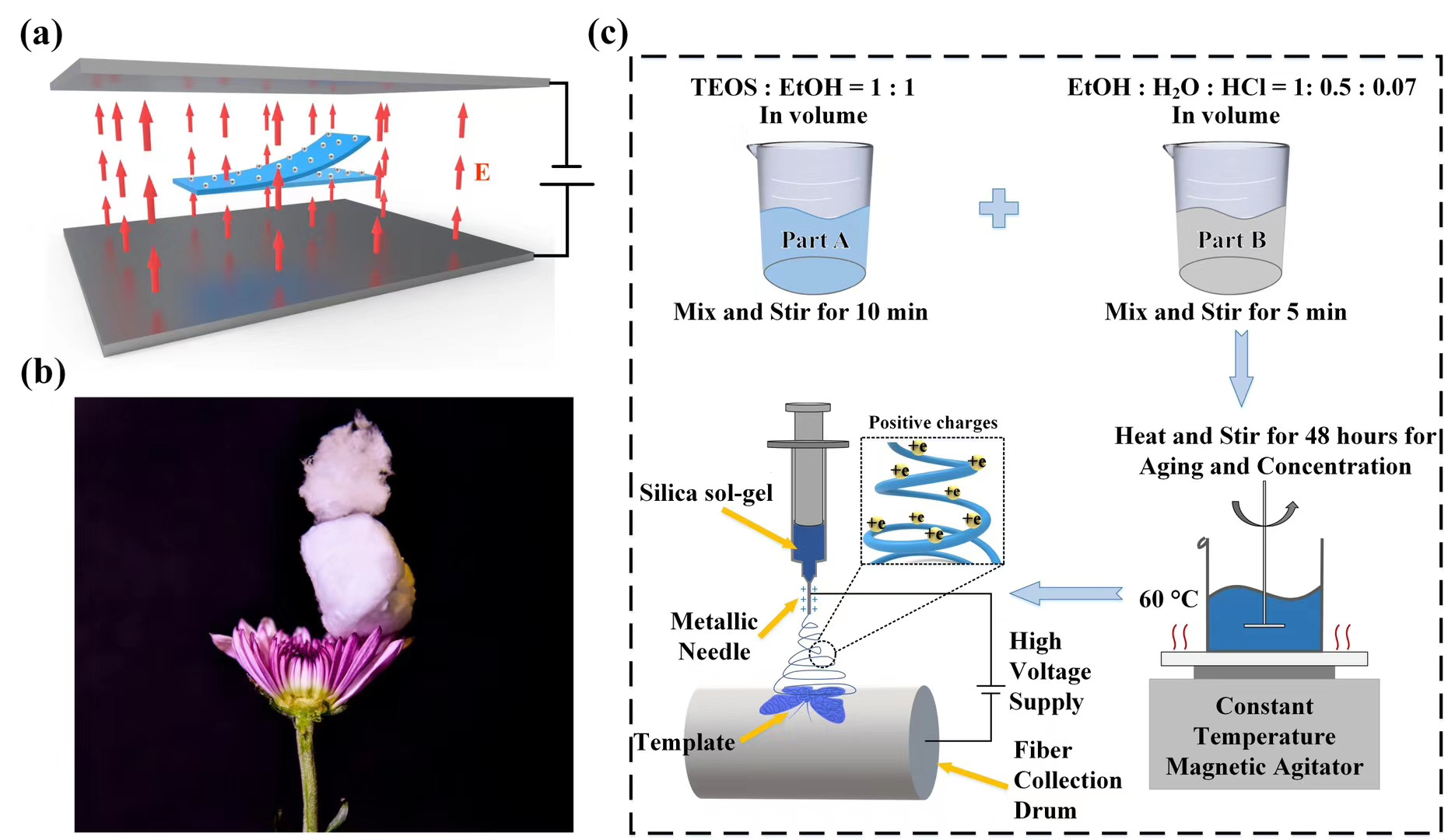
韩捷博士提出了一种基于电纺蓬松二氧化硅微/纳纤维的 无线超轻柔性驱动器,其驱动原理借鉴“蜘蛛通过带电蛛丝御风飞行”,利用静电纺丝过程中纤维所带静电荷来实现电场中的非接触驱动。
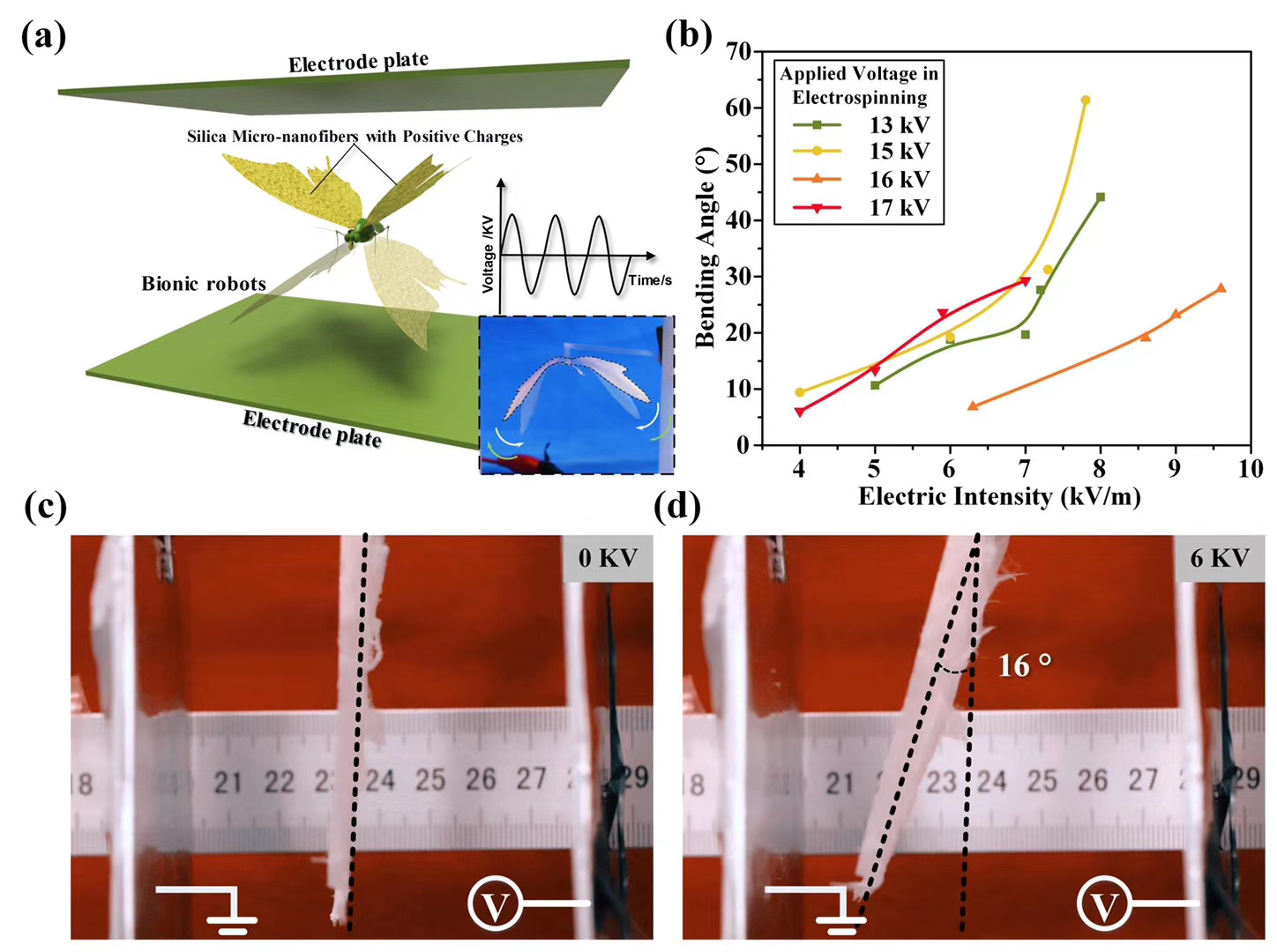
应用展示中的仿生蝴蝶可以在交流电场中实现~4 Hz频率的振动,与自然界中的蝴蝶频率相似。

Cite: Han, J., Jiang, W., Zhang, H. et al. Untethered, ultra-light soft actuator based on positively charged 3D fluffy silica micro-nanofibers by electrospinning. J Mater Sci 55, 12789–12800 (2020).
https://doi.org/10.1007/s10853-020-04944-5