张福政
电子邮箱:
所在单位:仪器科学与技术学院
学历:直博
办公地点:
性别:男
联系方式:
学位:博士
职称:助理教授
博士生导师:否
硕士生导师:是
学科:仪器科学与技术
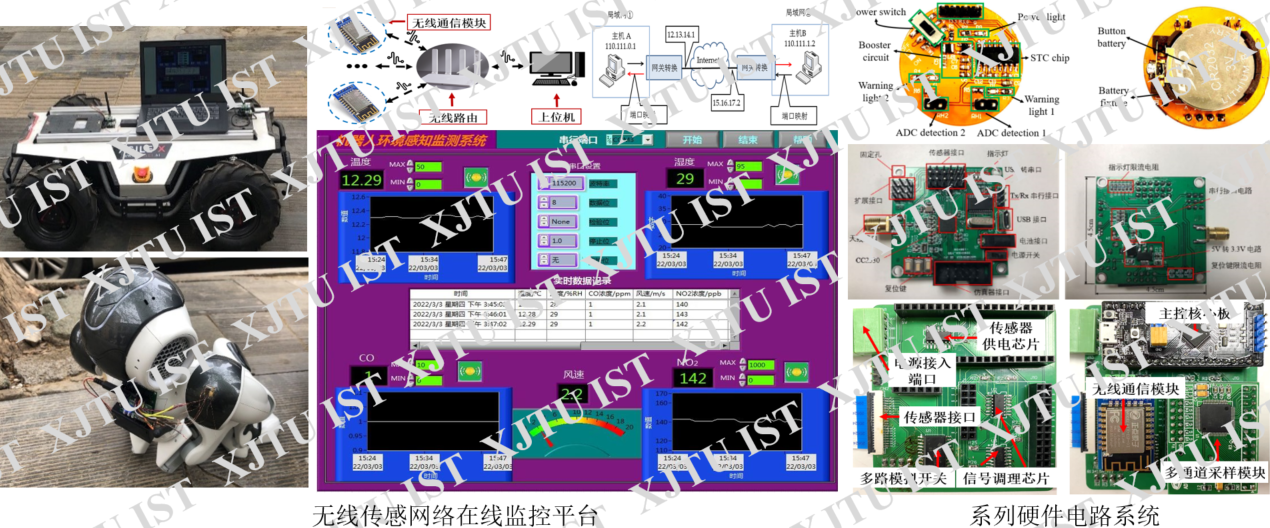
针对多参量环境参数的实时监测需求,设计了环境多参量在线监控系统,分别在轮式机器人和双足机器人进行了测试,实现了温湿度、PM2.5、风速、风向、NO2、CO气体等多参量环境数据的在线实时显示、存储、超限预警等功能。针对传感器复杂多源信号的耦合和解耦问题,制作了基于C8T6主控芯片的硬件电路,解决了传感器回路中电流串扰的问题,实现了阵列传感器复杂信号的分时解耦读取,并通过无线路由与软件平台建立通信。研制了步态识别系统的软件平台,实现了数据通信处理、足底压力云图显示与在线实时步态判别。