张福政
电子邮箱:
所在单位:仪器科学与技术学院
学历:直博
办公地点:
性别:男
联系方式:
学位:博士
职称:助理教授
博士生导师:否
硕士生导师:是
学科:仪器科学与技术
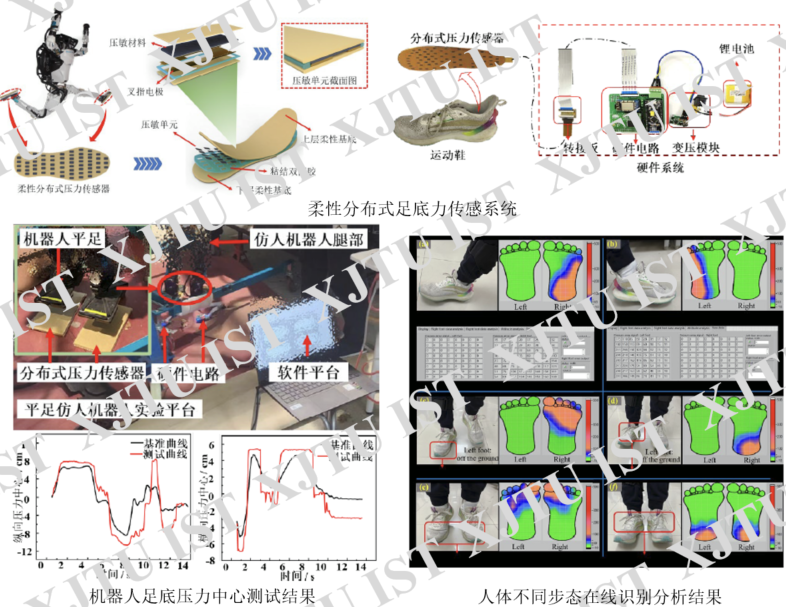
研制了具有检测范围宽、恢复速度快、耐磨性好的柔性分布式压力传感器,实现了多源复杂输出信号的分时解耦读取,实现了快慢走、直立与不同方向倾斜等姿态的准确在线识别。研制的柔性分布式压力传感器步态识别系统不仅能够为仿人智能机器人的精准行进控制提供基础数据支撑,进而有效提升仿人机器人的操控能力;此外,在糖尿病足、脊柱侧弯病症矫正等医疗康复,体育训练及健康监护等多个领域均具有极大的应用潜力和价值。