林启敬
所在单位:仪器科学与技术学院
学历:硕博连读
办公地点:
性别:男
联系方式:
学位:博士
职称:教授
博士生导师:是
硕士生导师:是
所属院系:仪器科学与技术学院
学科:机械工程
邮箱:
通讯/办公地址:
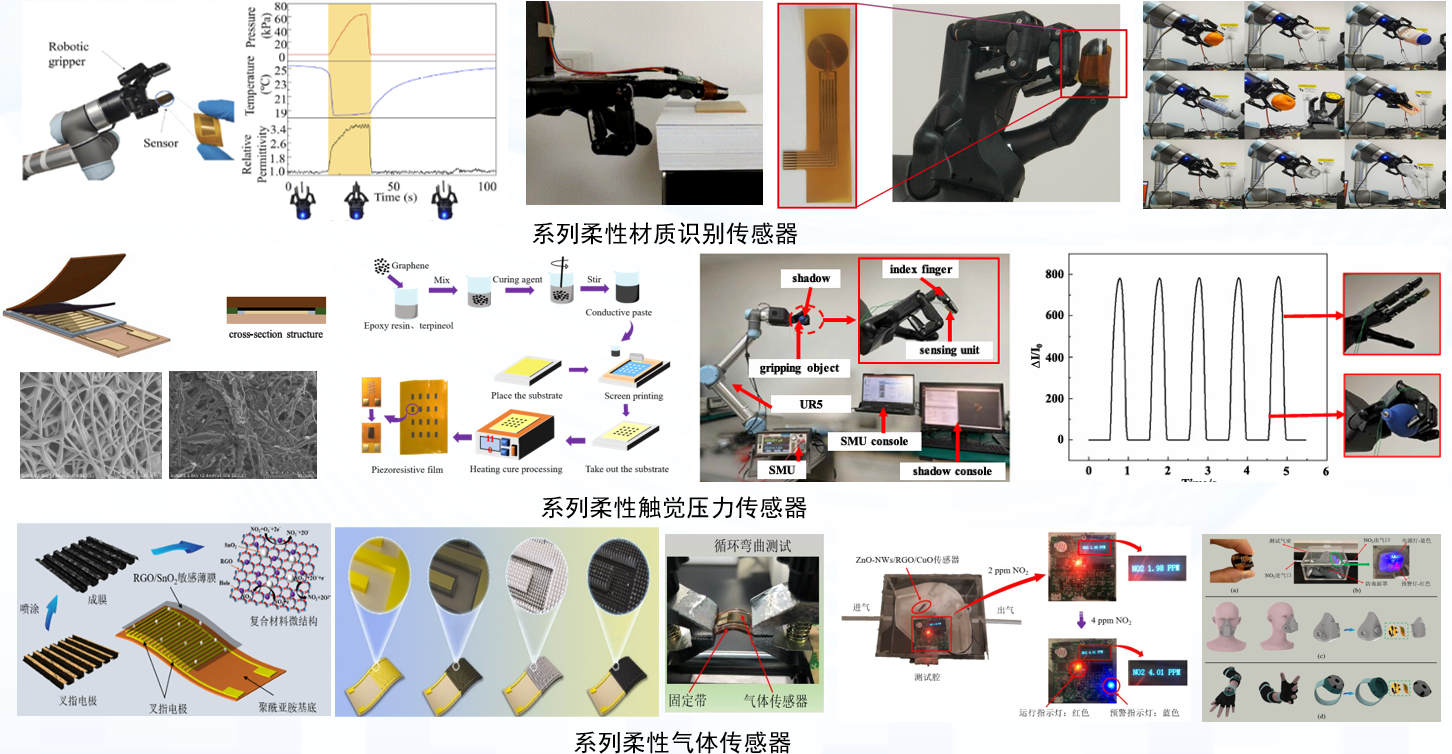
针对机器人灵巧手在复杂作业环境中的精确材质识别需求,研制了系列柔性多参数材质识别传感器,实现了对多种绝缘体(炭黑橡胶、硅橡胶、聚四氟乙烯等)和金属导体(不锈钢、黄铜、紫铜、铝合金、铁等)的识别,材质识别种类达23种,识别准确率稳定超过98%。利用柔性材质识别传感器,可以实现个性化工件的智能化识别、筛选和分拣,对于提升工厂的智能化水平、提高生产效率和产品多样性、提高制造水平和经济性具有重要意义。
针对仿人机器人足底复杂压力信息高精度检测和传感器柔性化需求,研制了具有检测范围宽、恢复速度快、耐磨性好的柔性阵列式压力传感器,解决了多源复杂输出信号的分时解耦读取问题,实现了快慢走、直立与不同方向倾斜等姿态的准确在线识别。研制的柔性阵列式压力传感器步态识别系统不仅能够为仿人智能机器人的精准行进控制提供基础数据支撑,进而有效提升仿人机器人的操控能力。此外,在糖尿病足、脊柱侧弯病症矫正等医疗康复,体育训练及健康监护等多个领域均具有极大的应用潜力和价值。
面向野外未知或危险场所使用机器人进行武器、工具、救援等精确操作任务的需求,研制了系列柔性温度、湿度、流速和NO2、CO气体等环境感知集成传感器,设计了机器人环境多参量智能化柔性感知系统,实现了四参量及以上环境参数的高精度协同感知。研制的柔性多参量环境感知系统可赋予机器人在未知或危险环境中对多种关键环境参数的实时精准感知能力,提升其任务执行的智能性与安全性,在应急救援、安防侦察、危险作业等领域具有重要应用价值。