

Marker points 3D matching based on Delaunay triangfulation structure and error dispersion
点击次数:
发布时间:2026-05-04
发布时间:2026-05-04
影响因子:2.9
DOI码:10.1088/1361-6501/ad667e
论文名称:Marker points 3D matching based on Delaunay triangfulation structure and error dispersion
教研室:新能源装备与质量工程研究所
发表刊物:Measurement Science and Technology
刊物所在地:ENGLAND
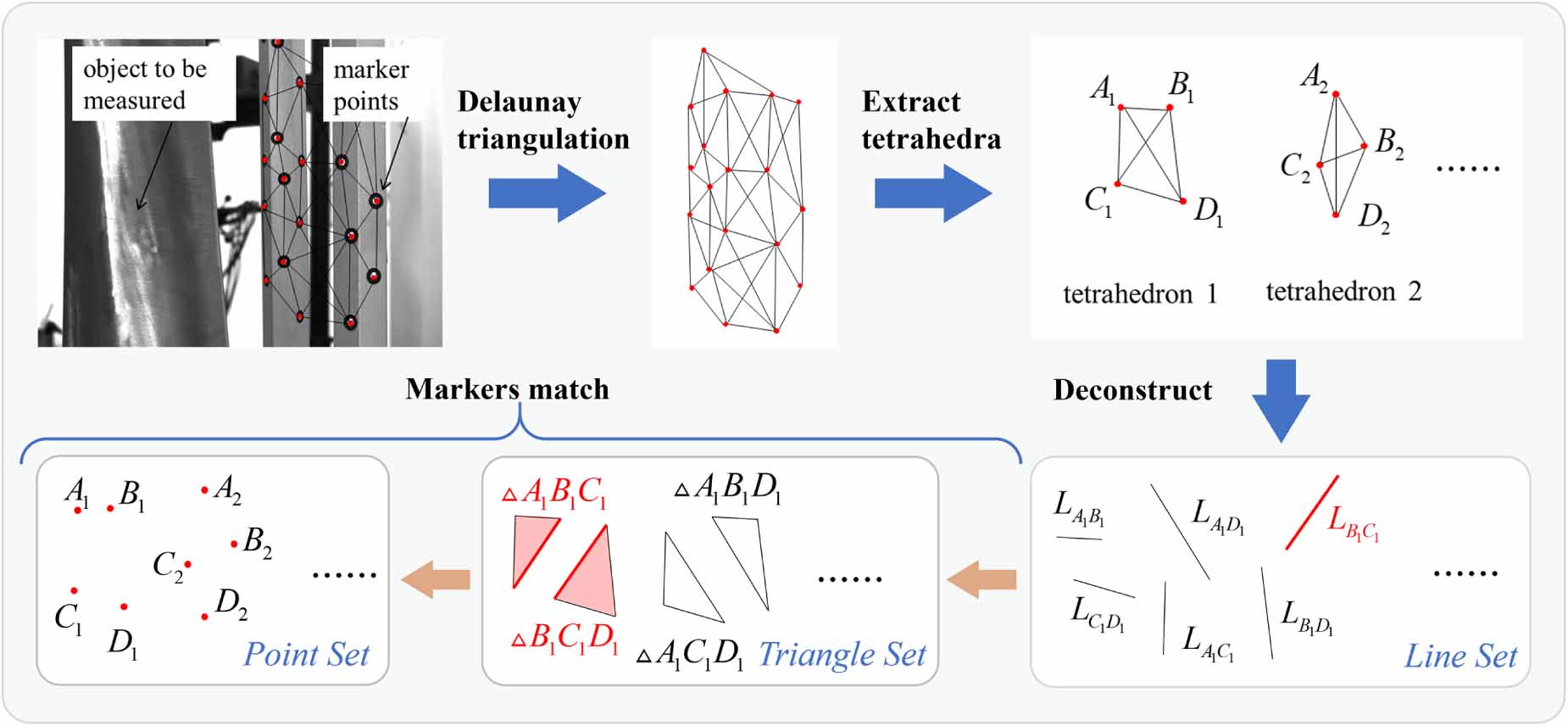
摘要:Point cloud registration techniques based on marker points are widely used in optical 3D industrial measurements. However, in this process, marker points 3D matching methods are often haunted by low efficiency and accuracy. To improve the performance of marker points 3D matching, we propose a two-step method of ‘matching-verification’. In the matching process, Delaunay triangulation is introduced to extract the 3D structure of the marker points set, and then the 3D structure is deconstructed into 2D units for matching, which simplifies complexity and improves the efficiency of the algorithm. In the verification process, the mismatched pairs of points are located and removed by the method that is based on the error dispersion of initial matched results, and the initial transformation results are iteratively verified to obtain the optimal transformation matrix. The0957-0233 experimental results show that our method takes an average of 2.2 s for each matching, the average error of coarse registration point cloud is 0.075 mm and the root mean square is 0.219 mm, which effectively solves the problem of the low efficiency and accuracy of marker points 3D matching methods.
合写作者:黄军辉,李子君,段琼琼,祁苗伟,Wei Wang,Qiang Dong
第一作者:靳瑞迪
论文类型:期刊论文
通讯作者:王昭
论文编号:115006
学科门类:工学
一级学科:机械工程
文献类型:J
卷号:35
期号:11
ISSN号:0957-0233
是否译文:否
收录刊物:SCI