

A deep-learning based high-accuracy camera calibration method for large-scale scene
点击次数:
发布时间:2026-05-04
发布时间:2026-05-04
影响因子:3.7
DOI码:10.1016/j.precisioneng.2024.02.019
论文名称:A deep-learning based high-accuracy camera calibration method for large-scale scene
教研室:新能源装备与质量工程研究所
发表刊物:Precision Engineering
刊物所在地:UNITED STATES
关键字:Camera calibration;Deep neural network;Large-scale scene;Binocular stereo vision;Three-dimensional (3D) metrology
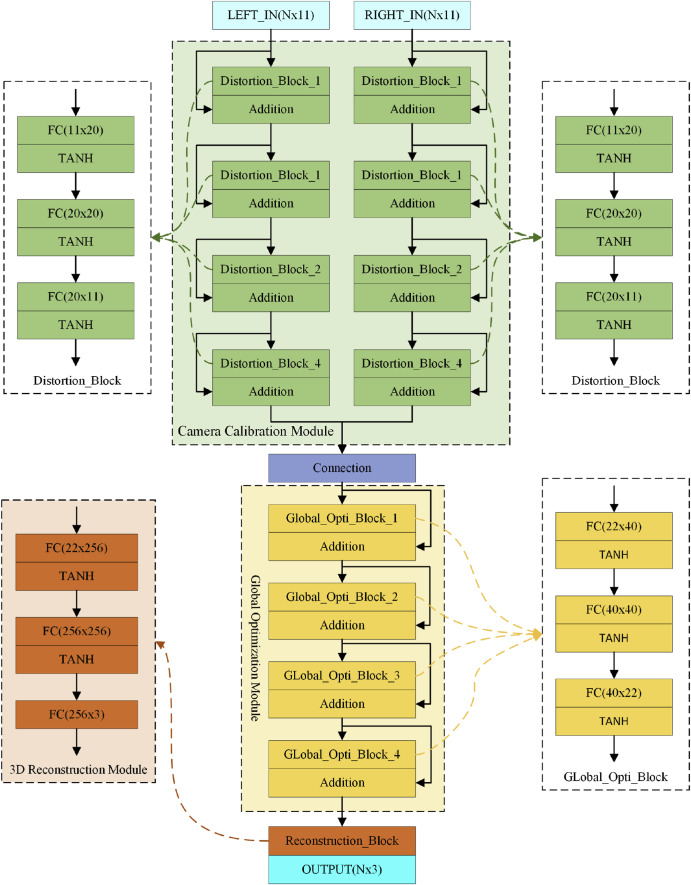
摘要:Accurate three-dimensional (3D) measurement for large field of view (FOV) is currently a significant research field. Accordingly, system calibration is crucial to ensure accuracy. However typical calibration methods often involve the use of large calibration objects, which is not only expensive but also difficult to achieve sufficient accuracy. A novel method based on a dual-brand deep neural network (DNN) is proposed for the system calibration. Taking advantage of the concept of “divide and conquer”, the FOV is divided into sub-regions with a part of overlapping regions by a small calibration object, which forms a large calibration object covering the whole FOV. Then the sub-regions are fused into a global framework and further optimized by the proposed dual-brand DNN. The proposed method reduces the need for calibration objects while improving the calibration accuracy and generalization ability in large FOV. A series of experiments have been designed to prove the effectiveness and robustness of the proposed method.
合写作者:黄军辉,邢超,李子君,祁苗伟,高建民,艾松
第一作者:段琼琼
论文类型:期刊论文
通讯作者:王昭
学科门类:工学
一级学科:机械工程
文献类型:J
卷号:88
页面范围:464-474
ISSN号:0141-6359
是否译文:否
发表时间:2024-03-13
收录刊物:SCI